ArduPilot 获取开销信息
Method
ArduPilot Log
ArduPilot 的日志字段 PM,即Performance Monitoring日志消息提供了详细的性能指标,可直接反映交叉编译固件的性能开销
启用条件
需要将 ArduPilot 的参数 Bitmask 设置为启用System Performance
如果要在硬件中专门测试开销,而不解锁油门或者实际飞行,则将参数 LOG 值设置为1
- 在Mission Planner中设置参数值(但每次编译之后都需要重新设置)
- 交叉编译之前将该参数的默认值修改为1,位于
./libraries/AP_Logger/AP_Logger.cpp,搜索_DISARMED
具体字段
| FIELD | DESCRIPTION |
|---|---|
| NLon | 长时间运行的主循环的数量(即,根据SCHED_LOOP_RATE - ex,循环的时间比应该的时间长20%以上)。3 ms(400 Hz速率) |
| NLoop | 显示自上次PM消息以来的循环总数。这允许您计算运行缓慢的循环的百分比(不应高于15%)。注意,该值将取决于自动驾驶仪时钟速度 |
| MaxT | 自上次PM消息以来任何循环所用的最长时间。这不应超过调度器循环周期的120%,但在电机处于待命状态的时间间隔内会高得多 |
| Mem | 可用内存(字节) |
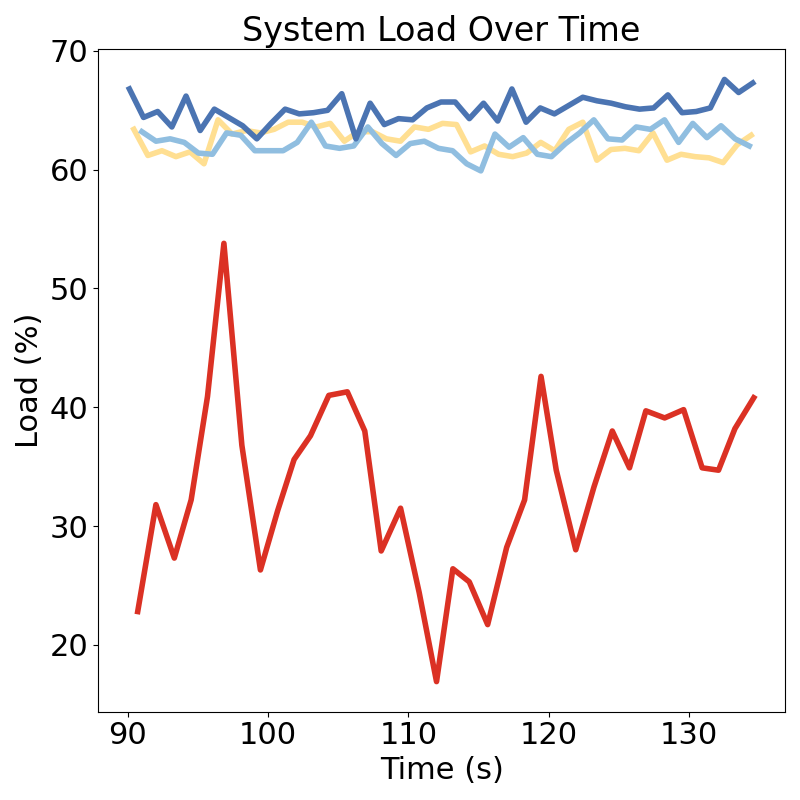
| Load | 使用CPU时计划程序循环周期的百分比(乘以10) |
常用的字段即 Mem 以及 Load,将该日志字段导出后根据飞控运行时间TimeUS作为横轴,Mem 或 Load作为纵轴即可绘制折线图,如图
QGC Mavlink检测
使用QGC连接飞控(SITL/开发板)时,通过Analyze Tools -> MAVLink检测
可以看到 Mavlink检测的相关信息,如SYS_STATUS, MEMINFO等等,甚至能实时绘制数据折线图
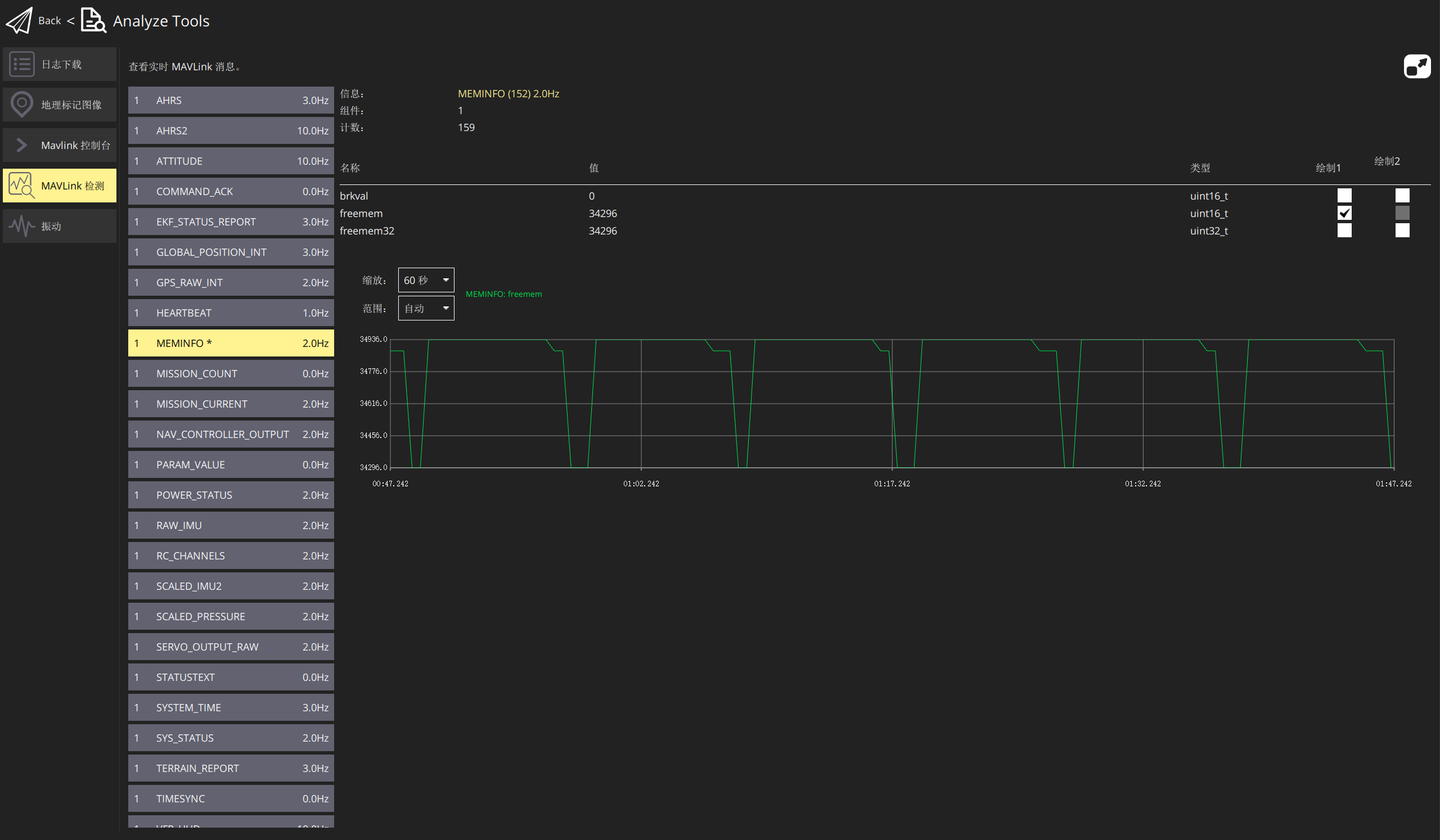
但不能直接通过QGC导出这些数据,只能通过日志单独导出这些值
而QGC字段的 SYS_STATUS 等价于ArduPilot Log中的 log_Performance 结构体,记录点位于libraries/AP_Scheduler/AP_Scheduler.cpp
Reference
https://ardupilot.org/copter/docs/common-downloading-and-analyzing-data-logs-in-mission-planner.html
📑
目录