MuJoCo-Rust Demos
完整代码见 https://github.com/M3ngL/mujoco-rust-demos
Init settings
https://github.com/MuJoCo-Rust/MuJoCo-Rust 该项目是针对 MuJoCo Rust 的FFI binding
- 顶层封装使用
mujoco-rust-0.0.6 - 底层 binding 展示
mujoco-rs-sys-0.0.4https://docs.rs/mujoco-sys/latest/mujoco_sys/
该项目仅支持到 MuJoCo 2.3.5,因此需要将本地系统的 MuJoCo 设置为对应的旧版本,新版本的 MuJoCo 3.x 无法适配
MuJoCo release下载地址 https://github.com/google-deepmind/mujoco/releases/tag/2.3.5
MuJoCo 常用的类
- mjData
- mjContact
- mjModel
- …
在 mujoco-rust 内主要分为了两类,no-render, render类,对应于非渲染和渲染类相关
使用 mujoco-rust 项目方式
use std::ptr;
let model = mujoco_rust::Model::from_xml("simple.xml".to_string()).unwrap();
let simulation = MuJoCoSimulation::new(model);
let mj_data = &*simulation.state.ptr();
let mj_contact = &*mj_data.contact;
Demos 主要针对无人机模型的操作以及获取相关数据,渲染画面做了解释
使用的无人机模型原始文件下载 https://github.com/google-deepmind/mujoco_menagerie/tree/main/skydio_x2
- Sensor Data,是从 mujoco-rust 加载的模型中获取传感器数据,以及根据模型名称获得其ID
- UI,是渲染 MuJoCo 内部画面并显示,或者合并多个画面后显示
- Vedio Streaming,是将渲染的画面以视频流的方式传递到其他客户端
- Lidar,是以多个 Rangefinder 的值绘画激光雷达图
- Model Crash,是获取模型碰撞的相关信息,包括碰撞点位置、碰撞数量等等
Sensor Data
MuJoCo 能支持的sensors https://mujoco.readthedocs.io/en/stable/XMLreference.html
How to get sensor data
- 通过传感器定义顺序获得
在已知模型文件中的传感器定义顺序时,可以通过访问传感器组的存储地址sensor_adr以及每个传感器输出数据的维度sensor_dim,以此为基础从传感器数据数组sensordata()中获取对应的传感器值
如下所示的xml文件定义sensor标签
<sensor>
<gyro name="body_gyro" site="imu"/>
<accelerometer name="body_linacc" site="imu"/>
<framequat name="body_quat" objtype="site" objname="imu"/>
</sensor>
我们可以通过以下方式获取每种传感器对应的值,其中sensordata()返回的是一个数组,存储了当前时刻所有传感器的值
let model = mujoco_rust::Model::from_xml("../x2/scene.xml".to_string()).unwrap();
let mj_model = unsafe { *model.ptr() };
// 0: gyro
let gyro_start = unsafe { *mj_model.sensor_adr.add(0) } as usize;
let gyro_dim = unsafe { *mj_model.sensor_dim.add(0) } as usize;
let gyro_data = &simulation.sensordata()[gyro_start..gyro_start + gyro_dim];
// 1: accelerometer
let acc_start = unsafe { *mj_model.sensor_adr.add(1) } as usize;
let acc_dim = unsafe { *mj_model.sensor_dim.add(1) } as usize;
let acc_data = &simulation.sensordata()[acc_start..acc_start + acc_dim];
// 2: framequat
let att_start = unsafe { *mj_model.sensor_adr.add(2) } as usize;
let att_dim = unsafe { *mj_model.sensor_dim.add(2) } as usize;
let att_data = &simulation.sensordata()[att_start..att_start + att_dim];
- 通过传感器名称获得
同样需要知道模型文件中关于传感器名称的定义,如下
<body>
<site name="rf_0" pos="0.1 0 0.05" zaxis="1 0 0"/>
<site name="rf_15" pos="0.1 0 0.05" zaxis="0.9659 0.2588 0"/>
<site name="rf_30" pos="0.1 0 0.05" zaxis="0.8660 0.5 0"/>
...
<site name="rf_330" pos="0.1 0 0.05" zaxis="0.8660 -0.5 0"/>
<site name="rf_345" pos="0.1 0 0.05" zaxis="0.9659 -0.2588 0"/>
</body>
...
<sensor>
<rangefinder name="body_rf_0" site="rf_0" cutoff="10" noise="0.01"/>
<rangefinder name="body_rf_15" site="rf_15" cutoff="10" noise="0.01"/>
<rangefinder name="body_rf_30" site="rf_30" cutoff="10" noise="0.01"/>
...
<rangefinder name="body_rf_315" site="rf_315" cutoff="10" noise="0.01"/>
<rangefinder name="body_rf_330" site="rf_330" cutoff="10" noise="0.01"/>
<rangefinder name="body_rf_345" site="rf_345" cutoff="10" noise="0.01"/>
</sensor>
已知body标签下的site name,通过传入其site name到name_to_id(),返回其传感器在传感器组中的ID
再通过ID进一步从传感器值数组中获取对应的值
let model = mujoco_rust::Model::from_xml("../x2/scene.xml".to_string()).unwrap();
let mj_model = unsafe { *model.ptr() };
// get Rangefinder ids
let mut rf_ids: Vec<u16> = Vec::new();
for angle in angles.iter() {
let sensor_name = format!("rf_{}", angle);
let id = model.name_to_id(ObjType::SITE, &sensor_name).unwrap();
rf_ids.push(id);
}
// get data from id
for id in rf_ids.iter() {
let data = simulation.sensordata()[*id as usize + 1];
print!("rf_{}: {:?} ", id, data);
}
How to get model names
之前讲到关于模型和传感器的名称,均是通过直接查验xml文件得知,但也可以通过代码获取模型文件中定义的所有结构名称,包括传感器、几何体名称、环境名称等等
use std::ffi::CStr;
use std::slice;
// get all model names
let model = mujoco_rust::Model::from_xml("../x2/scene.xml".to_string()).unwrap();
let mj_model = unsafe { *model.ptr() };
let mut model_names: Vec<&str> = Vec::new();
unsafe{
let data = slice::from_raw_parts(mj_model.names as *const u8,
mj_model.nnames as usize);
let mut start = 0;
for (i, &c) in data.iter().enumerate() {
if c == 0 {
let s = CStr::from_bytes_with_nul_unchecked(&data[start..=i]);
model_names.push(s.to_str().unwrap());
start = i + 1;
}
}
}
println!("{:?}", model_names);
UI
https://mujoco.readthedocs.io/en/stable/programming/visualization.html
Render scene & display
使用glfw来初始化UI窗口,并将该窗口与对应OpenGL渲染进行绑定
- 初始化 GLFW
use glfw;
let mut glfw = glfw::init(glfw::FAIL_ON_ERRORS).unwrap();
- 初始化window以及相关监听函数
use glfw;
use gl;
use glfw::Context;
// create window
let (mut window, events) = glfw
.create_window(1200, 900, "MuJoCo UI", glfw::WindowMode::Windowed)
.expect("Unable to create GLFW window.");
// associate GLFW window with an OpenGL state
window.make_current();
// Enable GLFW window listening for specific user input events.
window.set_key_polling(true); // keyboard input
window.set_cursor_pos_polling(true); // mouse position
window.set_mouse_button_polling(true); // which key is pressed by the mouse
window.set_scroll_polling(true); // mouse wheel infor
// dynamically loading OpenGL functions
gl::load_with(|symbol| window.get_proc_address(symbol) as *const _);
- 进一步地,初始化mujoco render相关变量,分别是相机
cam、场景scn、上下文con和选项opt
use mujoco_rs_sys::render;
use mujoco_rs_sys::no_render;
let mut cam = render::mjvCamera_::default();
let mut scn = render::mjvScene_::default();
let mut con = render::mjrContext_::default();
let mut opt = render::mjvOption_::default();
unsafe {
no_render::mjv_defaultCamera(&mut cam);
render::mjv_defaultScene(&mut scn);
render::mjr_defaultContext(&mut con);
no_render::mjv_makeScene(simulation.model.ptr(), &mut scn, 1000);
render::mjr_makeContext(simulation.model.ptr(), &mut con, 200);
no_render::mjv_defaultOption(&mut opt);
}
其中cam定义渲染视角,scn定义场景结构体,con封装 OpenGL 相关的状态(如着色器、纹理),opt 决定如何渲染场景(例如显示哪些几何体、是否启用灯光等)
至此,渲染结构体均初始化完成
- 在主循环内实时更新每个时刻的场景
use mujoco_rs_sys::render;
use mujoco_rs_sys::no_render;
// sim running until the window closes
while !window.should_close() {
// associate GLFW window with an OpenGL state
window.make_current();
// get window size
let (width, height) = window.get_framebuffer_size();
// clear buffer
gl::Clear(gl::COLOR_BUFFER_BIT | gl::DEPTH_BUFFER_BIT);
// update render
no_render::mjv_updateScene(
simulation.model.ptr(),
simulation.state.ptr(),
opt,
ptr::null(),
&mut cam,
0xFFFFFF,
&mut scn,
);
// define viewport
let viewport = render::mjrRect_ {
left: 0,
bottom: 0,
width: width,
height: height,
};
// start render
render::mjr_render(viewport, &mut scn, &mut con);
// swap buffer to display render scene
window.swap_buffers();
... // sim operation
// Get events in real time
glfw.poll_events();
}
1st\3rd-person perspective
指定渲染的视角为第一人称或是第三人称,要在cam属性中做修改
use mujoco_rs_sys::render;
let mut cam = render::mjvCamera_::default();
// No actual camera specified
cam.type_ = 1; // free perspective
cam.trackbodyid = 1; // Set tracked object ID
cam.distance = 5.0; // Set distance between perspective and model
// actual camera specified
cam.type_ = 2; // fixed perspective
cam.fixedcamid = cam_id; // Set fixed camera id
mujoco render中,当没有指定实际的camera时,默认视角为第三人称视角,因此仅需要设置视角类型、视角跟踪移动的模型ID以及视角与模型之间的距离即可
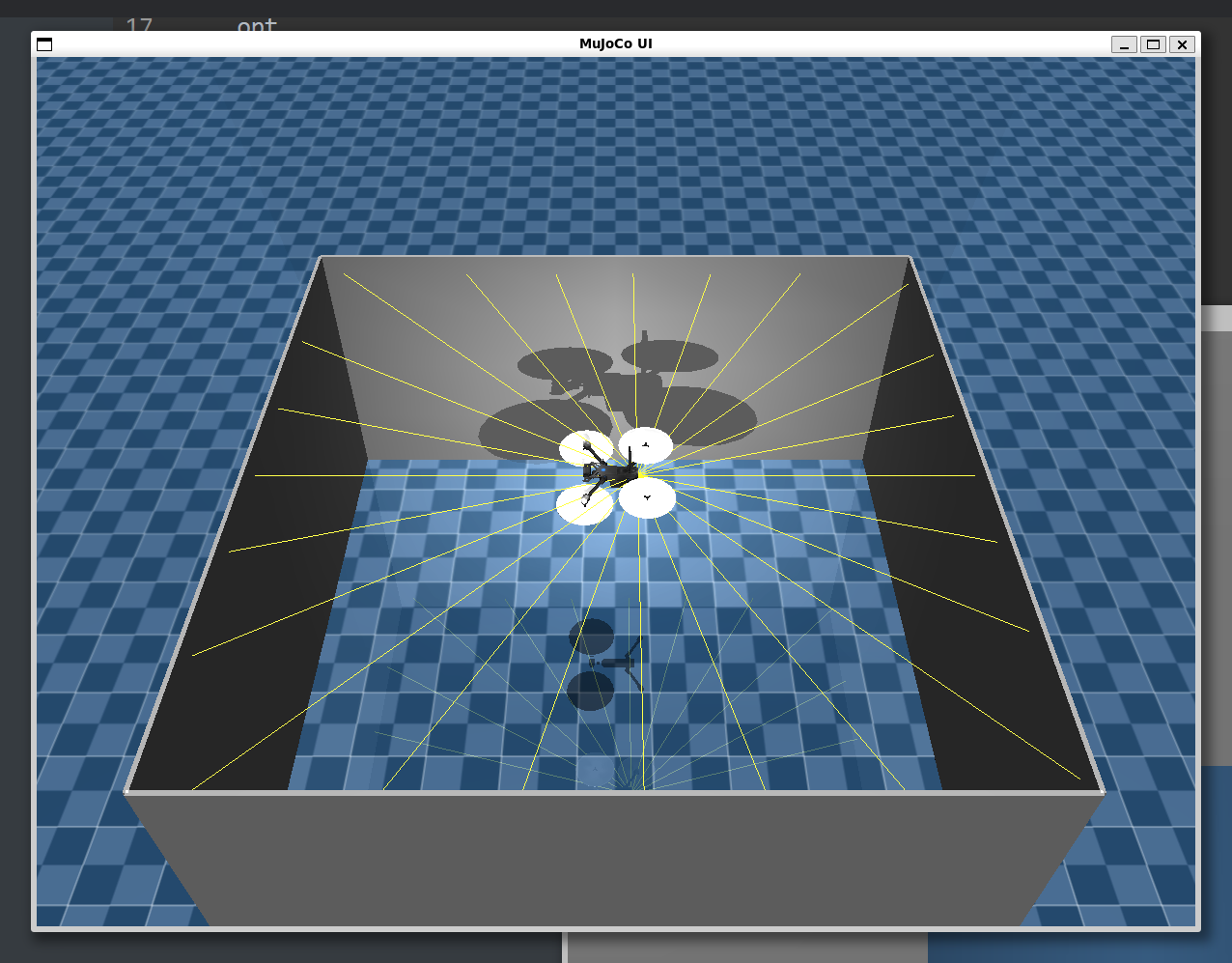
当需要模仿相机实际在模型中某个位置时,需要指定camera ID,将渲染的视角设置为该camera的视角,如图所示,是以第一人称视角俯视正下方的视角
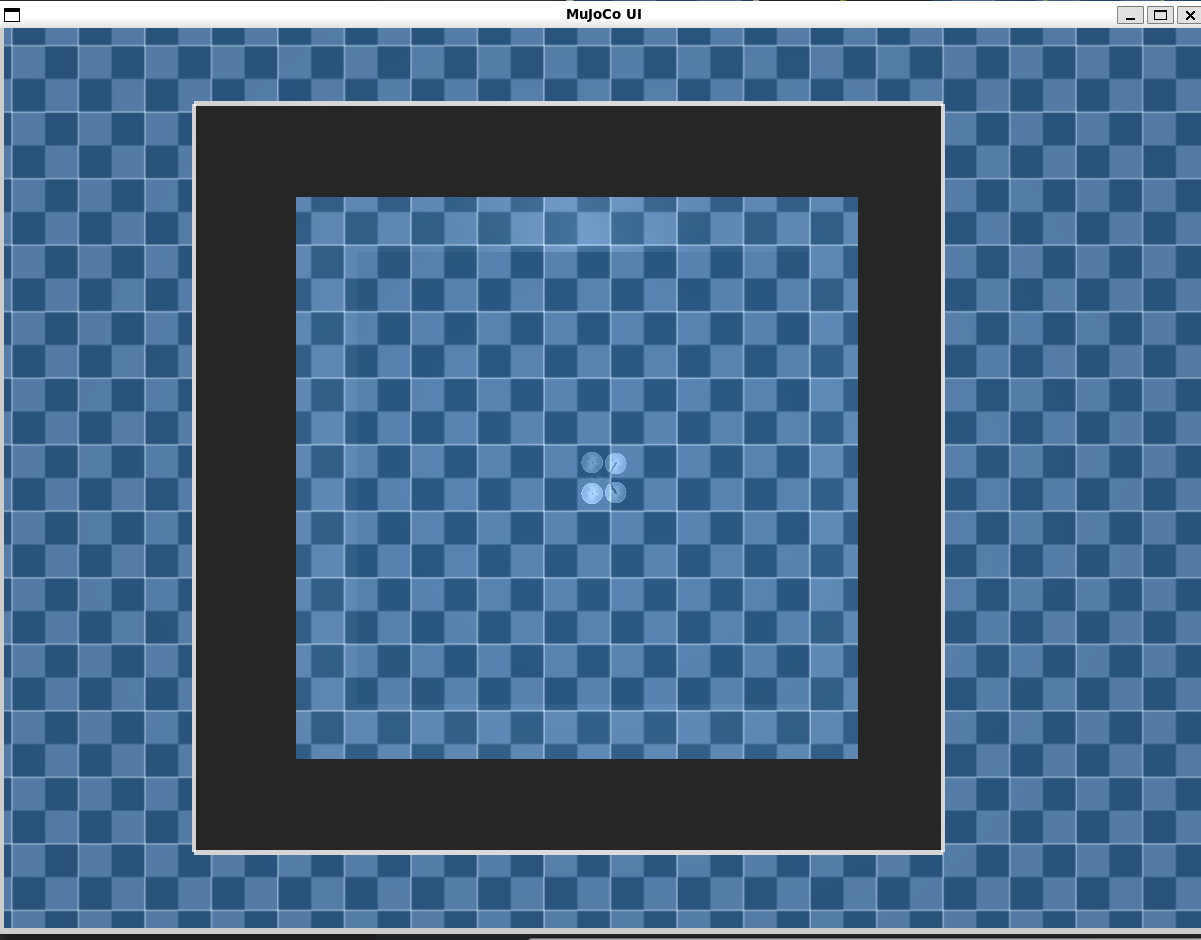
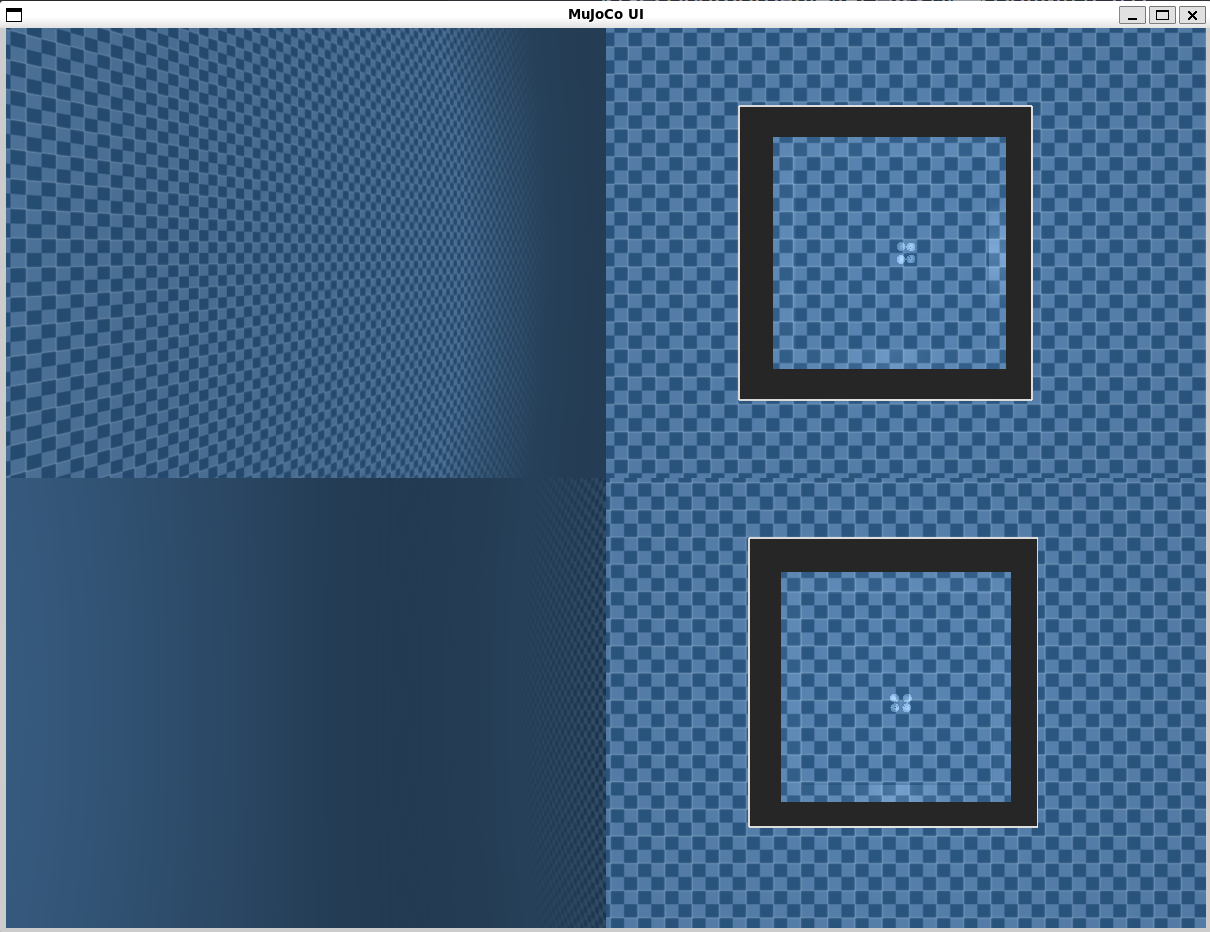
Multiple perspectives in one window
将多个camera的画面渲染到一个glfw窗口中, 效果如图所示
由于需要管理多个视角,这里定义一个结构体方便管理,结构体中使用Vec存储各个camera的信息
pub struct UIState {
pub cameras: Vec<render::mjvCamera_>,
pub opt: render::mjvOption_,
pub scenes: Vec<render::mjvScene_>,
pub contexts: Vec<render::mjrContext_>,
pub window: glfw::Window,
pub events: mpsc::Receiver<(f64, glfw::WindowEvent)>,
}
首先,初始化GLFW作为全局的图形化管理框架
let mut glfw = glfw::init(glfw::FAIL_ON_ERRORS).unwrap();
根据不同的camera,声明各自的视角、场景以及OpenGL状态(opt不需要重复声明定义)
pub fn ui_init(glfw: &mut glfw::Glfw, simulation: &Simulation, cam_ids: &[i32]) -> UIState {
... // init window & events
// initialize MuJoCo render structure
let mut cameras = Vec::new();
let mut scenes = Vec::new();
let mut contexts = Vec::new();
let mut opt = render::mjvOption_::default();
//Initialize scene and context for each camera
for &cam_id in cam_ids {
let mut cam = render::mjvCamera_::default();
let mut scn = render::mjvScene_::default();
let mut con = render::mjrContext_::default();
unsafe {
no_render::mjv_defaultCamera(&mut cam);
render::mjv_defaultScene(&mut scn);
render::mjr_defaultContext(&mut con);
no_render::mjv_makeScene(simulation.model.ptr(), &mut scn, 1000);
render::mjr_makeContext(simulation.model.ptr(), &mut con, 200);
}
// 1st-person perspective
cam.type_ = 2; // fixed perspective
cam.fixedcamid = cam_id;
// output
cameras.push(cam);
scenes.push(scn);
contexts.push(con);
}
unsafe {
no_render::mjv_defaultOption(&mut opt);
}
UIState {
cameras,
opt,
scenes,
contexts,
window,
events
}
}
在main函数中使用该函数的方式,传入模型文件中定义的camera ID即可
// get camera ID by specifying name
let cam1_id = simulation.model.name_to_id(ObjType::CAMERA, "camera1").unwrap() as i32;
let cam2_id = simulation.model.name_to_id(ObjType::CAMERA, "camera2").unwrap() as i32;
let cam3_id = simulation.model.name_to_id(ObjType::CAMERA, "camera3").unwrap() as i32;
let cam4_id = simulation.model.name_to_id(ObjType::CAMERA, "camera4").unwrap() as i32;
// 1st-person perspective
let mut ui_state_1st = ui::ui_init(&mut glfw, &simulation, [cam1_id, cam2_id, cam3_id, cam4_id].as_ref());
同理,实时更新每个camera的渲染视角,需要将各个camera渲染的视角,各自作为主窗口的一部分导入渲染,由此其viewport需要重新调整定义方式
// get window size
let (width, height) = ui_state.window.get_framebuffer_size();
let num_cameras = ui_state.cameras.len().min(4);
let cols = if num_cameras < 2 { 1 } else { 2 };
let rows = if num_cameras <= 2 { 1 } else { 2 };
let sub_window_width = width / cols as i32;
let sub_window_height = height / rows as i32;
...
for i in 0..num_cameras {
...
// calc sub window's pos in the main window
let row = i / cols;
let col = i % cols;
// define sub window viewport
let viewport = render::mjrRect_ {
left: col as i32 * sub_window_width,
bottom: (rows - 1 - row) as i32 * sub_window_height,
width: sub_window_width,
height: sub_window_height,
};
...
}
在主循环中调用该函数,传入init_ui()的返回值UI_State即可
// 1st-person perspective
let mut ui_state_1st = ui::ui_init(&mut glfw, &simulation, [cam1_id, cam2_id, cam3_id, cam4_id].as_ref());
// sim running until the window closes
while !ui_state_1st.window.should_close() {
ui::update_scene(&simulation, &mut ui_state_1st);
... // sim operation
// Get events in real time
glfw.poll_events();
}
note:同时渲染多个视角,会导致CPU负载增大许多,因此需要按需渲染
Free glfw resource
对应的,在主循环结束后,应当释放相关资源,如下
use mujoco_rs_sys::render;
...
unsafe{
render::mjv_freeScene(&mut scn);
render::mjr_freeContext(&mut con);
}
若是多视角的话,则在for循环中逐个释放即可
unsafe{
for i in 0..ui_state.scenes.len() {
render::mjv_freeScene(&mut ui_state.scenes[i]);
render::mjr_freeContext(&mut ui_state.contexts[i]);
}
}
Vedio Streaming
- 初始化GLFW窗口,属性设置为不可见
let mut glfw = glfw::init(glfw::FAIL_ON_ERRORS).unwrap();
let (mut window, _events) = {
glfw.window_hint(glfw::WindowHint::Visible(false));
glfw.create_window(640, 480, "hidden", glfw::WindowMode::Windowed)
.expect("Unable to create hidden GLFW window.")
};
注意窗口的尺寸大小640x480应与后续的ffmpeg初始化视频流分辨率-video_size参数一致,否则会导致视频流画面失真
- 初始化ffmpeg
利用std::process::Command调用本地系统的FFmpeg命令,并传入其命令参数
use std::process::{Command, Stdio};
let rtsp_url = "rtsp://localhost:8554/mystream".to_string();
let ffmpeg = Command::new("ffmpeg")
.args([
"-f", "rawvideo",
"-pixel_format", "rgb24",
"-video_size", "640x480",
"-framerate", "30",
"-i", "pipe:",
"-c:v", "libx264",
"-pix_fmt", "yuv420p",
"-preset", "ultrafast",
"-tune", "zerolatency",
"-f", "rtsp",
"-rtsp_transport", "tcp",
&rtsp_url
])
.stdin(Stdio::piped())
.stderr(Stdio::piped())
.spawn() // Spawn the process
.expect("Failed to start FFmpeg");
其中将该子进程的stdin连接到父进程(即目前的rust项目)的stdout,即渲染的画面帧,使得父进程能够向其写入画面帧数据
- 逐帧渲染并传入管道
原理是在 Rust 程序中生成视频帧,然后通过 child.stdin.unwrap().write_all(frame_bytes) 写入管道。FFmpeg 接收管道输出,并实时编码、推送 RTSP 流,其他客户端可通过 rtsp://localhost:8554/mystream 播放
unsafe {
// get window size
let (width, height) = ui_state.window.get_framebuffer_size();
// clear buffer
gl::Clear(gl::COLOR_BUFFER_BIT | gl::DEPTH_BUFFER_BIT);
// update & render
no_render::mjv_updateScene(
simulation.model.ptr(),
simulation.state.ptr(),
&ui_state.opt,
ptr::null(),
&mut ui_state.cam,
0xFFFFFF,
&mut ui_state.scn,
);
...
// read the main window's Pixels
render::mjr_readPixels(rgb.as_mut_ptr(), ptr::null_mut(), full_viewport, &mut ui_state.con);
// flips the image
let mut flipped_rgb = vec![0u8; (width * height * 3) as usize];
for y in 0..height {
for x in 0..width {
let src_idx = ((y * width + x) * 3) as usize;
let dst_idx = (((height - 1 - y) * width + x) * 3) as usize;
flipped_rgb[dst_idx] = rgb[src_idx];
flipped_rgb[dst_idx + 1] = rgb[src_idx + 1];
flipped_rgb[dst_idx + 2] = rgb[src_idx + 2];
}
}
let _ = stdin.write_all(&flipped_rgb);
}
其中渲染画面的部分与UI渲染一致,只是在画面渲染更新后,不再调用window.swap_buffers()交换buffer数据以显示渲染的画面,而是读取该画面的rgb数据并返回(视频流有时会上下颠倒画面,因此还有垂直翻转rgb数据),写入管道输出
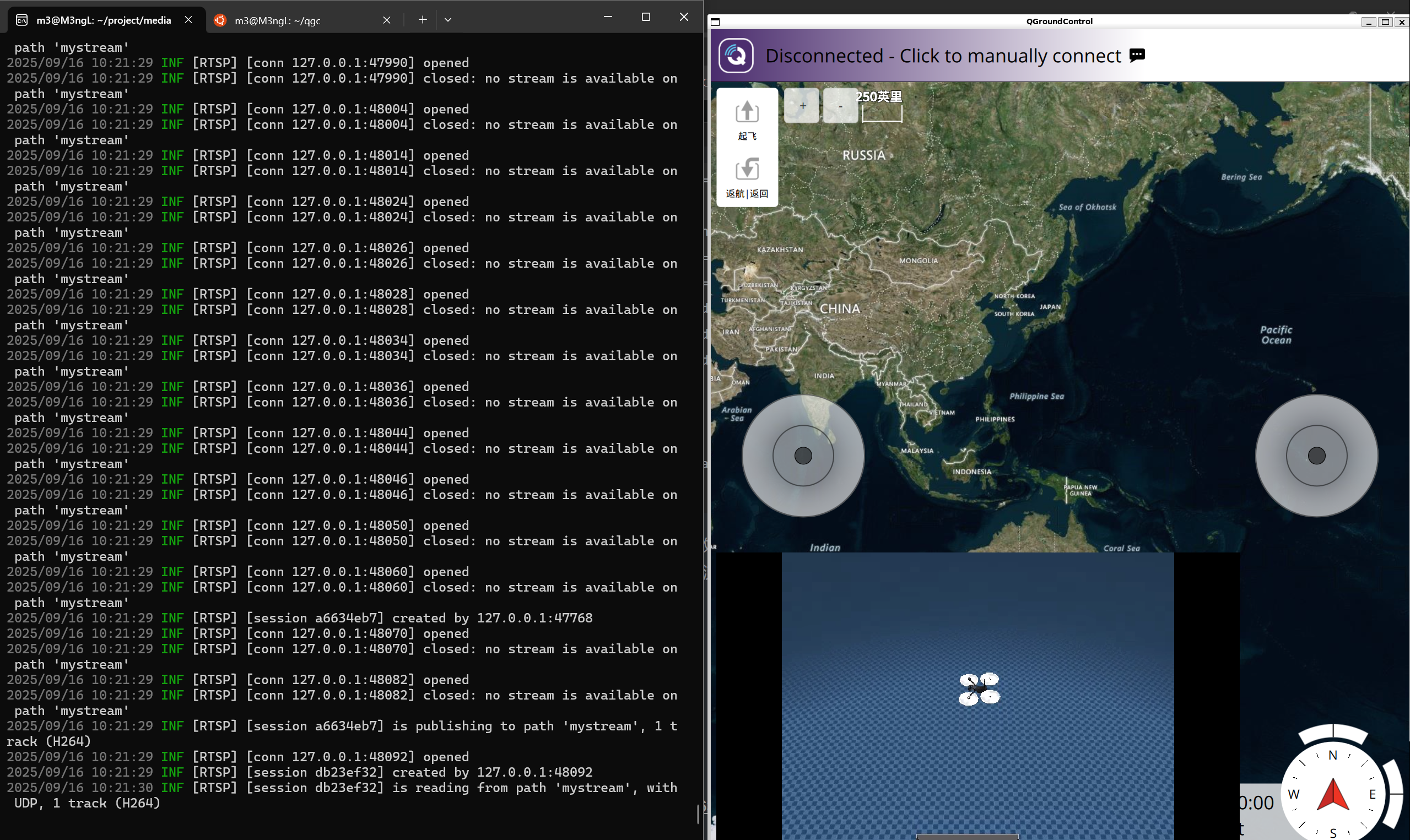
视频流效果如图(使用地面站QGC显示),FFmpeg的推送需要有类似于mediamtx这样的RTSP协议服务器做中介,才能传递到其他客户端显示
Lidar
这部分主要解释怎么通过Mujoco model中的rangefinder展示出雷达图像,具体雷达图绘制算法不再赘述
概括来说,雷达图在 mujoco sim 中是使用多个rangefinder来实现的,rangefinder的传感器值为其距离可碰撞物体的距离
- 获取rangefinder IDs
首先xml文件中定义的 rangefinder 格式如下
<site name="rf_0" pos="0.1 0 0.05" zaxis="1 0 0"/>
<site name="rf_15" pos="0.1 0 0.05" zaxis="0.9659 0.2588 0"/>
<site name="rf_30" pos="0.1 0 0.05" zaxis="0.8660 0.5 0"/>
<site name="rf_45" pos="0.1 0 0.05" zaxis="0.7071 0.7071 0"/>
<site name="rf_60" pos="0.1 0 0.05" zaxis="0.5 0.8660 0"/>
...
<site name="rf_300" pos="0.1 0 0.05" zaxis="0.5 -0.8660 0"/>
<site name="rf_315" pos="0.1 0 0.05" zaxis="0.7071 -0.7071 0"/>
<site name="rf_330" pos="0.1 0 0.05" zaxis="0.8660 -0.5 0"/>
<site name="rf_345" pos="0.1 0 0.05" zaxis="0.9659 -0.2588 0"/>
使用Sensor Data部分的方法获取ID
let mut rf_ids: Vec<u16> = Vec::new();
let angles = [
0, 15, 30, 45, 60, 75, 90, 105, 120, 135, 150, 165,
180, 195, 210, 225, 240, 255, 270, 285, 300, 315, 330, 345,
];
for angle in angles.iter() {
let sensor_name = format!("rf_{}", angle);
let id = model.name_to_id(ObjType::SITE, &sensor_name).unwrap();
rf_ids.push(id);
}
- 获取rangefinder的值
将每个rangefinder的传感器名称(以角度命名)从度转换为弧度,以表示该传感器在极坐标系中的角度;并限制rangefinder检测的最远距离,且筛去负值(当其值为负数时,表示无效测量,例如无障碍物)
use std::f64::consts::PI;
let mut points = Vec::new();
let angles = [
0, 15, 30, 45, 60, 75, 90, 105, 120, 135, 150, 165,
180, 195, 210, 225, 240, 255, 270, 285, 300, 315, 330, 345,
];
for (i, &id) in rf_ids.iter().enumerate() {
let distance = simulation.sensordata()[(id +1) as usize];
let theta = angles[i] as f64 * PI / 180.0;
if distance >= 0.0 && distance <= 10.0 {
points.push((theta, distance));
}
}
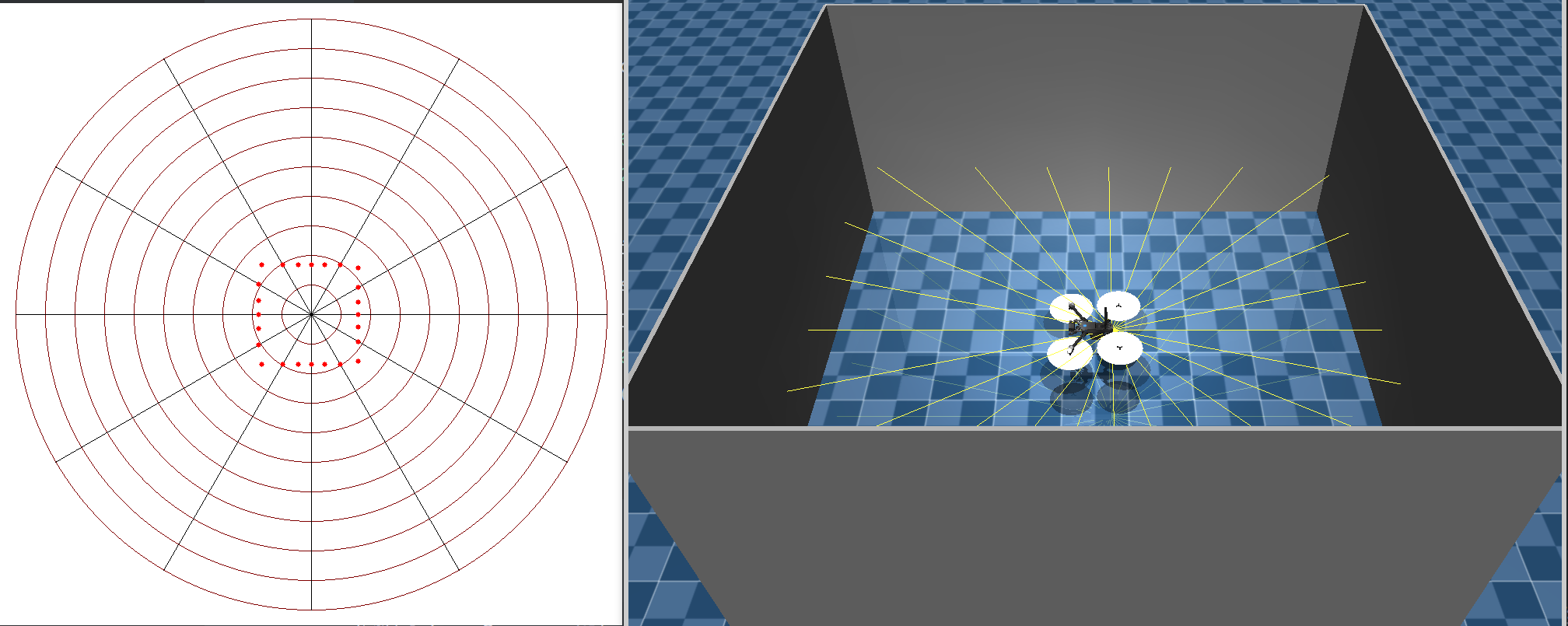
- 绘制Lidar图
根据每个rangefinder的值distance以及其在极坐标的位置绘制,使用minifb::window而不是glfw::window,因为前者在绘制2d图像时更方便快速,代码不再赘述,效果如图所示
Model Crash
与模型碰撞相关的数据有mjData_中的ncon描述当前时刻有几个碰撞点,mjData_的contact结构体中定义碰撞的相关细节
mujoco-rust中定义的
mjData_同mjData
在mujoco-rust,获取当前模型的mjData_方式如下
let model = mujoco_rust::Model::from_xml("../x2/scene.xml".to_string()).unwrap();
let simulation = mujoco_rust::Simulation::new(model.clone());
unsafe {
let mj_data = &*simulation.state.ptr(); // &mjData_
}
进一步获取相关碰撞数据,如每个碰撞点的位置
// get contact data in mj_data
unsafe {
let mj_data = &*simulation.state.ptr(); // mj_data needs to be updated in real time
let ncon = mj_data.ncon as usize;
for i in 0..ncon {
let contact = &*mj_data.contact.add(i);
let pos = contact.pos;
println!(
"contact {} at [{}, {}, {}]",
i, pos[0], pos[1], pos[2]
);
}
}
另外,注意模型定义文件中的类别要一致,否则不计入碰撞数组,相关字段为 contype="x" conaffinity="x"